



О.О. Акимов, канд. техн. наук
А.О. Анисенко, магістрант
А.Г. Горобець, студент
Чернігівський державний технологічний університет, м. Чернігів, Україна
ДОСЛІДЖЕННЯ ВПЛИВУ ПРУЖНОСТІ КРІПЛЕННЯ УКОЧУВАЛЬНОГО РОЛИКА НА ДИНАМІЧНІ ХАРАКТЕРИСТИКИ НАМОТУВАЛЬНОГО МЕХАНІЗМУ МАШИНИ БП-340
Приведено результати дослідження впливу пружності кріплення укочувального ролика на динамічні характеристики намотувального механізму машини БП-340. Одержані залежності параметрів механізму від товщини тіла намотування та жорсткості пружного кріплення укочувального ролика.
Вступ. Основними динамічними характеристиками намотувального механізму є критичні швидкості бобінотримача та динамічна складова сили притискування до нього укочуючого ролика. Перспективним напрямком управління динамічними характеристиками є оптимальний вибір пружних характеристик елементів машин, що запобігає збільшенню величини динамічної складової сили притискування.
Аналіз публікацій. Визначенню інерційних параметрів бобінотримачів та їх критичних швидкостей присвячені роботи деяких учених [1; 2]. Визначення динамічних параметрів намотувальних механізмів знайшло відображення в роботі Корітисського Я.І. [1], але механізми даного виду там не були розглянуті.
Мета роботи. Визначити вплив виду кріплення укочуючого ролика на динамічну складову сили притискування за весь час напрацювання пакування.
Методи і результати досліджень. Розрахункова схема механізму намотування наведена на рис. 1.
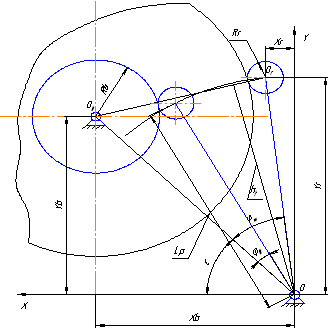
Рис. 1. Схема механізму намотування
Залежність кута повороту важеля бобінотримача від товщини тіла намотування t визначиться з геометричних міркувань і записується таким чином:
 , (1)
, (1)
де Lb – відстань від осі важеля до осі бобінотримача;
Db – діаметр бобіни;
Dr – діаметр укочувального ролика;
φ0 – кут між важелем і лінією ООb у початковий момент часу;
φт – кут між важелем і лінією ООb у будь-який момент часу;
Lp – довжина важеля укочувального ролика.
Плече сили притискування укочувального ролика ht визначимо як відстань від осі O (O, O) до прямої ОrОb (полярна відстань):
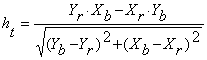 . (2)
. (2)
Плече сили притискування залежить від товщини тіла намотування наступним чином:

Рис. 2. Залежність довжини плеча сили від товщини тіла намотування
Зважаючи на збільшення маси пакування, що веде до зміни гравітаційного моменту притискування ролика до бобінотримача, перемінність довжини плеча, в подальшому будемо розглядати механізм як систему з постійними параметрами, які змінюються з часом дискретно, а за аргумент приймемо товщину тіла намотування.
Динамічна модель намотувального механізму з пружним кріпленням укочувального ролика зображена на рис. 3.
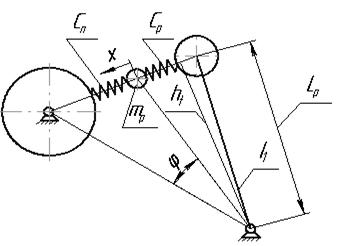
Рис. 3. Динамічна модель механізму з пружним кріпленням укочувального ролика
Кінетична енергія системи визначиться з виразу:
![]() , (3)
, (3)
де ![]() – маса укочувального ролика;
– маса укочувального ролика;
![]() – момент інерції важеля,
– момент інерції важеля, ![]() ;
;
Потенційна енергія визначиться з виразу:
![]() (4)
(4)
На лінії контакту тіла намотування з укочувальним роликом система отримує кінематичне збудження:
![]() , (5)
, (5)
де ![]() ,
, ![]() – ексцентриситети бобіни і укочувального ролика;
– ексцентриситети бобіни і укочувального ролика;
![]() – кутова швидкість укочувального ролика;
– кутова швидкість укочувального ролика;
![]() – кутова швидкість обертання бобінотримача;
– кутова швидкість обертання бобінотримача;
![]() – передаточне відношення між бобіною і роликом;
– передаточне відношення між бобіною і роликом;
![]() ,
, ![]() – діаметри укочувального ролика і бобіни;
– діаметри укочувального ролика і бобіни;
Аналогічно [1], використовуючи вираз кінетичної та потенціальної енергій, за допомогою рівняння Лагранжа другого роду з врахуванням рівняння (5), одержимо систему диференціальних рівнянь другого порядку, що описують вимушені коливання ролика:
 (6)
(6)
Інтегрування системи диференційних рівнянь здійснюється в системі Mathcad за допомогою оператора Y=Rkadapt(y,t0,t1,N,D), що реалізує метод Рунге-Кутта з перемінним кроком інтегрування. Динамічна складова сили притискування визначається аналогічно [1]. Значення параметрів механізму, використаних у системі (6), визначалися з технічного регламенту технологічного процесу.
Залежність СКЗ (середньоквдратичного значення) динамічної складової сили притискування при пружному та жорсткому кріпленні ролика приведена на рис. 4
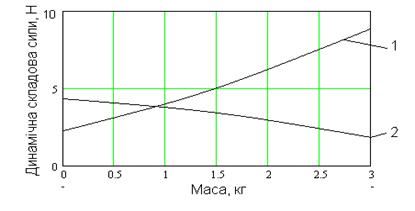
1 – жорстке кріплення ролика; 2 – пружне кріплення ролика (Ср=5х104 Н/м)
Рис. 4. Залежність динамічної сили притискування від виду кріплення ролика
В якості пружних елементів були використанні гумові циліндричні шарніри з розмірами: зовнішній діаметр 0.015 м, внутрішній діаметр 0.005 м, довжина 0.015 м.
З рис. 4 видно, що пружне кріплення ролика для напрацьованого пакування знижує величину динамічної складової сили притискування майже в чотири рази, але на початку процесу намотування спостерігається збільшення динамічної складової на короткому відрізку часу майже в 2 рази.
На рис. 5 наведені характерні часові залежності сили притискування для різних періодів напрацювання пакування.
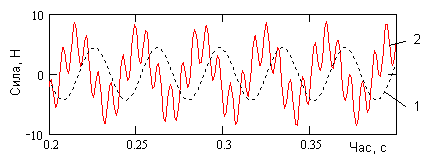
а) Початок напрацювання пакування
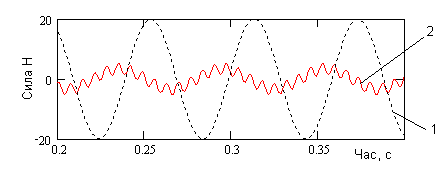
б) Маса пакування 3 кг
1 - жорстке кріплення ролика; 2 – пружне кріплення ролика
Рис. 5. Часові характеристики динамічної складової сили притискування
На рис. 5 спостерігається значна ефективність використання пружного кріплення ролика, особливо на заключному етапі напрацювання пакування.
Висновки. Одержана математична модель вимушених коливань укочувального ролика при його пружному кріпленні.
Проведені дослідження впливу пружного кріплення на динамічну складову сили притискування.
Пружне кріплення ролика для напрацьованого пакування знижує величину динамічної складової сили притискування майже в чотири рази, але на початку процесу намотування спостерігається збільшення динамічної складової на короткому відрізку часу майже в 2 рази.
Список використаних джерел
1. Коритысский Я. И. Динамика упругих систем текстильных машин / Коритысский Я. И. – М: Лег. и пищ. пром-сть, 1982. – 272 с.
2. Фаворин М. В. Моменты инерции тел: справочник / под ред. М. М. Гернета. – Изд. 2-е, перераб. и доп. – М.: Машиностроение, 1977. – 511 с.