



Б.В. Орловський, д-р техн. наук
Київський національний університет технологій та дизайну, м. Київ, Україна
РОЗРОБКА І ДОСЛІДЖЕННЯ ПОСТПРОЦЕСНОЇ МАШИНИ ВИГОТОВЛЕННЯ ВИРОБІВ З КАПРОНОВИХ МОНОНИТОК
Наведені результати кінематичного і динамічного аналізу механізму прецизійного дискретного переміщення двох капронових монониток у формі сплюснених спіралей під час їх пришивання до двох текстильних стрічок на швейній машині. Замість традиційного рушія у вигляді зубчастої рейки, яка переміщується по еліпсоподібній траєкторії у вертикальній площині, використано і досліджено рушій у вигляді позивних коліс кулісного (мальтійського) механізму, які рухаються разом з матеріалом у стартостопному режимі тільки у горизонтальній площині. Відсутність супутнього горизонтальному переміщенню вертикального переміщення матеріалу покращує якість виконання технологічної операції пришивання до текстильних стрічок біспіральних монониток з поліаміду-66 при поточному методі виготовлення пластмасових застібок-блискавок на двоголкових машинах ланцюгового стібка. Заміна механізму вертикального і горизонтального переміщення матеріалу механізмом одного горизонтального переміщення матеріалу покращує якість виконання технологічної операції пришивання біспіральних монониток з поліамду-66 до текстильних стрічок при поточному методі виготовлення пластмасових застібок-блискавок на двоголкових машинах ланцюгового стібка.
Вступ. Світовий об’єм виробництва застібки-блискавки (надалі «застібки») різних конструкцій складає більше 4 млрд метрів на рік, з яких біля 50% належить фірмі YKK(Японія). На Україні крупним заводом з виробництва застібки є Баришевський завод «Блискавка». Класифікація способів виготовлення застібок наведена на рис.1.
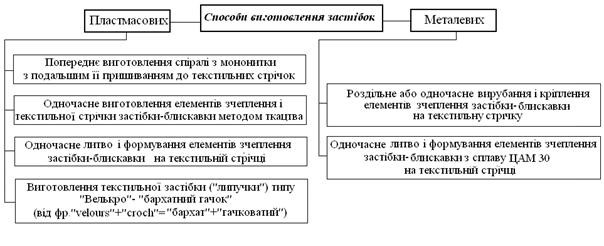
Рис.1. Класифікація способів виготовлення безперервних застібок
Методи та результати. Кінематична схема стартостопного механізму переміщення біспіральної застібки-блискавки з монониток під час її пришивання на швейній машині та розрахункова 3-масова динамічна модель наведені на рис.2. Конструктивною особливістю позивних коліс (стартостопного рушія) є те, що форма зубців їх торцевої поверхні є відображенням форми бокової поверхні спіралей з монониток і тому при роботі машини утворюється незвичайна механіко-технологічна кінематична пара у вигляді «зубчасте колесо (металеве) – рейкова передача (неметалева)». Стартостопний режим переміщення об’єктів зшивання потрібний за циклограмою роботи машини для їх зупинення при знаходженні голок у матеріалі текстильних стрічок. На засадах кінематичного зв’язку кута![]() повороту хреста з кутом
повороту хреста з кутом![]() повороту кривошипу:
повороту кривошипу: ![]() [1] отриманий наступний кінематичний зв’язок мiж кутовими швидкостями
[1] отриманий наступний кінематичний зв’язок мiж кутовими швидкостями ![]() і
і ![]() цих ланок:
цих ланок:
![]() (1)
(1)
де ![]() – кінематична характеристика мальтійського механізму (ММ), тут
– кінематична характеристика мальтійського механізму (ММ), тут
![]() і
і ![]() – довжина кривошипу і відстань між елементами стояка;
– довжина кривошипу і відстань між елементами стояка;
![]() – кількість пазів хреста (веденої ланки ММ).
– кількість пазів хреста (веденої ланки ММ).
Приведені моменти інерції для динамічної моделі на рис.2 б розраховані через моменти інерції окремих ланок (табл.1) для механізму на рис.2 а.
Таблиця 1
Параметри ланок динамічної моделі
|
Ланка механізму |
|
|
|
|
|
Кривошип для 6-пазового хреста |
10 |
9 |
2118,0 |
|
|
Вал кривошипу |
70 |
4 |
63,53 |
|
|
Шестерня конічна, 2 шт |
19 |
9 |
376,30 |
|
|
Хрест 6-пазовий |
6 |
18 |
1105,0 |
|
|
Вал хреста |
158 |
4 |
90,88 |
|
|
Упорні втулки валу хреста |
16 |
8,5 |
124,7 |
|
|
Червяк |
20 |
10,5 |
490,8 |
|
|
Червячне колесо |
15 |
11 |
8,0* |
|
|
Вали позивних коліс |
239 |
3 |
0,62* |
|
|
Шестерня циліндрична, 2 |
5 |
16 |
23,56* |
|
|
Колесо позивне, 2 in/ |
2,5 |
13 |
4,58* |
|
|
* |
||||

На кінематичній схемі (рис.2) і в математичній моделі (3) прийняті наступні позначення:
![]() – приведений до головного валу момент інерції механізмів голки, ниткопритягувача і човника;
– приведений до головного валу момент інерції механізмів голки, ниткопритягувача і човника;
![]() – момент інерції кривошипу;
– момент інерції кривошипу;
![]() – приведений момент інерції ведених ланок ММ;
– приведений момент інерції ведених ланок ММ;
![]() – приведена маса ділянки застібки-блискавки, яка переміщується відносно голок швейної машини;
– приведена маса ділянки застібки-блискавки, яка переміщується відносно голок швейної машини;
![]() – приведена жорсткість ділянки застібки-блискавки, яка переміщується відносно голок;
– приведена жорсткість ділянки застібки-блискавки, яка переміщується відносно голок;
![]() – крутильна жорсткість демпфера;
– крутильна жорсткість демпфера;
![]() – момент рушійних сил;
– момент рушійних сил;
![]() – зовнішні сили, які прикладені до застібки-блискавки;
– зовнішні сили, які прикладені до застібки-блискавки;
![]() – кут повороту головного валу;
– кут повороту головного валу;
![]() – кут повороту валу кривошипу;
– кут повороту валу кривошипу;
![]() – кут повороту валу хреста;
– кут повороту валу хреста;
![]() – лінійна координата положення застібки.
– лінійна координата положення застібки.
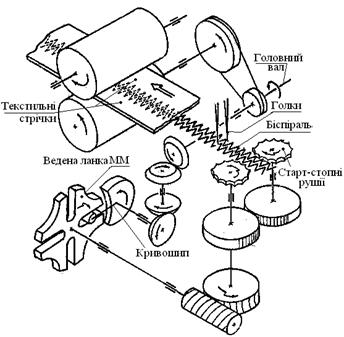
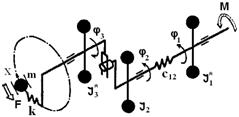
а б
Рис.2. Кінематична схема стартостопного механізму переміщення біспіральної застібки-блискавки з капронової мононитки при її пришиванні на швейній машині (а) і його 3-масова динамічна модель (б)
Визначаємо кінематичну енергію механіко-технологічної системи на рис.2 для узагальненого рівняння Лагранжа вигляду  [2]:
[2]:
![]() , (2)
, (2)
де ![]() – кінетична енергія приведеного до головного валу моменту інерції
– кінетична енергія приведеного до головного валу моменту інерції ![]() на рис.1 б у відповідності до рис.3 а;
на рис.1 б у відповідності до рис.3 а;
![]() – кінетична енергія мальтійського механізму;
– кінетична енергія мальтійського механізму;
![]() – кінетична енергія ділянки застібки-блискавки, яка переміщується під голкою.
– кінетична енергія ділянки застібки-блискавки, яка переміщується під голкою.
а б
в г
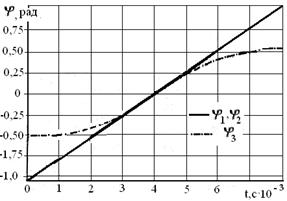
а – графіки ![]() переміщення; б – графіки
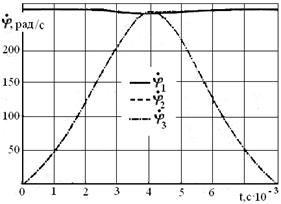
переміщення; б – графіки ![]() швидкостей; в – графіки
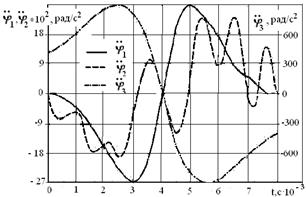
швидкостей; в – графіки ![]() прискорень; г – графіки
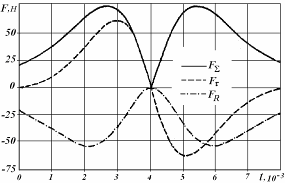
прискорень; г – графіки ![]() навантажень.
навантажень.
Рис.3. Результати чисельного рішення динамічної моделі (3) механізму переміщення біспіральної застібки-блискавки з капронової мононитки при її пришиванні на швейній машині
Оминаючи подальший формалізм Лагранжа, після визначення похідних за трьома узагальненими координатами![]() ,
,![]() і
і![]() від складових (1) кінетичної енергії, за трьома узагальненими швидкостями
від складових (1) кінетичної енергії, за трьома узагальненими швидкостями![]() ,
,![]() і
і![]() та похідними за часом
та похідними за часом ,
,  i
i ![]() та узагальнених сил
та узагальнених сил ![]() , отримуємо наступну систему з трьох диференціальних рівнянь другого порядку:
, отримуємо наступну систему з трьох диференціальних рівнянь другого порядку:
 (3)
(3)
де ![]() – передавальне відношення зчеплення стартостопних рушіїв (позивних коліс) з ділянкою біспіралі, яка переміщується, а саме між кутовою координатою
– передавальне відношення зчеплення стартостопних рушіїв (позивних коліс) з ділянкою біспіралі, яка переміщується, а саме між кутовою координатою ![]() повороту позивного колеса і лінійним переміщенням
повороту позивного колеса і лінійним переміщенням![]() спіралі (
спіралі (![]() – крок переміщення біспіралі для проколювання голкою між елементами застібки з мононитки);
– крок переміщення біспіралі для проколювання голкою між елементами застібки з мононитки);
![]() ,
,![]() і
і ![]() – сили тертя і зусилля протягування застібки роликами, що встановлені за голками;
– сили тертя і зусилля протягування застібки роликами, що встановлені за голками;
 функція знаку сил
функція знаку сил ![]() і
і ![]() сухого тертя
сухого тертя
текстильних стрічок по сталевій голковій пластині залежно від їх швидкості.
Для рішення системи (3) нелінійних диференціальних рівнянь 2-го порядку чисельним методом на ЕОМ ця система була перетворена в систему 6-ти диференціальних рівнянь першого порядку і доповнена нульовими початковими умовами, які відповідають моменту часу ![]() входу пальця кривошипу в паз хреста.
входу пальця кривошипу в паз хреста.
Враховуючи громіздкість правих частин перетвореної системи (3) для численного інтегрування перевага була надана багатокроковому методу прогнозу-корекції [5].
Результати рішення математичної моделі і результати силових розрахунків наведені на рис.3 у вигляді графіків (рис.3 а, б, в) функцій ![]() . На рис.3 г наведені залежності:
. На рис.3 г наведені залежності: ![]() – радіальна сила, яка діє між пазом хреста і пальцем кривошипу в напрямку вздовж радіуса кривошипу (позитивний напрям – до центру кривошипу);
– радіальна сила, яка діє між пазом хреста і пальцем кривошипу в напрямку вздовж радіуса кривошипу (позитивний напрям – до центру кривошипу); ![]() – тангенціальна сила;
– тангенціальна сила; ![]() – сумарна сила, направлена по нормалі до поверхні паза.
– сумарна сила, направлена по нормалі до поверхні паза.
Працездатність механізму була доведена результатами використання залежності![]() для оцінки форми і величини відносного зносу пальця кривошипу і паза веденої ланки ММ. Отримані результати були використані і впроваджені при створенні машини для виготовлення пластмасових біспіральних застібок на Баришевському заводі «Блискавка».
для оцінки форми і величини відносного зносу пальця кривошипу і паза веденої ланки ММ. Отримані результати були використані і впроваджені при створенні машини для виготовлення пластмасових біспіральних застібок на Баришевському заводі «Блискавка».
Висновки
Математична модель (3) і результати її рішення (рис.3) розкривають закономірності кінематики і динаміки у механіко-технологічній системі «стартостопний механізм – капронова біспіраль з поліаміду-66 – текстильні стрічки».
Використання функціонально адекватних стартостопних механізмів з реверсивною електромагнітною муфтою для з’єднання з головним валом є альтернативним рішенням застосування цільових механізмів з індивідуальним кроковим електроприводом для створення сучасних технологічних машин з мікропроцесорним керуванням.
Список використаних джерел
1. Артоболевский А.А. Синтез плоских механизмов / Артоболевский А.А., Левитский Н.И., Черкудинов С.А. – М.: Физматгиз, 1959. – 1084 с.
2. Бухгольц Н.Н. Основной курс теоретической механики / Бухгольц Н.Н. – М.: Наука, 1972. – 325 с.
3. Орловский Б.В. Устройство для соединения элементов застежки-молнии с лентой-носителем на швейной машине: а.с. №896113 SU / Орловский Б.В., Дзюба В.И., Музичишин В.Н. – опубл., Бюл. №1, 1982.
4. Пищиков В.О. Проектування швейних машин / Пищиков В.О., Орловський Б.В. – К.: Видавничо-поліграфічний дім «Формат», 2007. – 320 с.
5. Форсайт Дж. Машинные методы математических вычислений / Форсайт Дж., Малькольм М., Моулер К. – М.: Мир, 1980. – 272 с.